

Higinio González Jorge, Joaquin Martinez Sánchez, Luis Miguel González de Santos and Miguel Angel González de Santos
Large structures such as dams, wind farms, bridges, or buildings require continuous maintenance to guarantee the safety of their operation and a long useful life. These inspection processes are carried out manually, or more recently by drones equipped with optical and thermal infrared sensors. However, these sensors are only capable of detecting surface damage, leaving internal problems unmonitored.
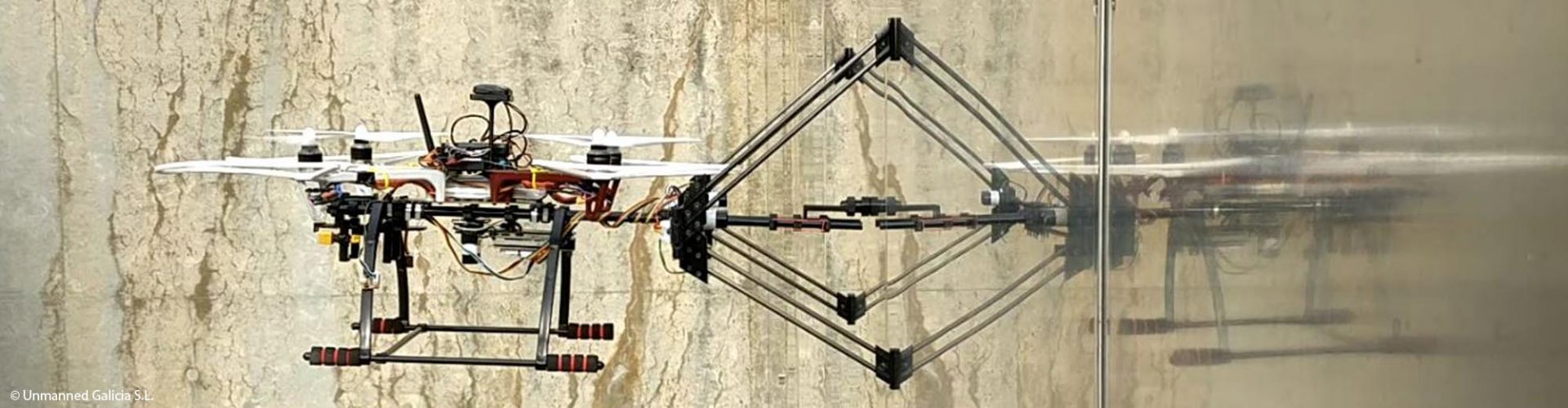
Contact-Drone is a drone payload that was developed to perform contact inspection tasks using GNSS data. It controls the movements of an unmanned aerial vehicle (UAV) based on location data and then uses LiDAR sensors when the drone nears the structure in question. This eliminates the human factor because the Contact-Drone payload will make the process independent of the flight controller.
Contact



